Robot Arduino
 | |
| robot Top | robot Bottom |
Visión de conjunto
NOTA: este producto está actualmente retirado y la documentación no se mantendrá al día
El robot Arduino Arduino es el primer oficial sobre ruedas. El robot tiene dos procesadores, uno en cada uno de sus dos placas. La Junta de motor controla los motores, y la Junta de Control lee sensores y decide cómo operar. Cada una de las tablas es una completa programable placa Arduino utilizando el IDE de Arduino.
Ambas tarjetas de control y motor son tableros de microcontroladores basados en el ATmega32u4 ( ficha técnica ). El robot tiene muchas de sus pines asignadas a los sensores y actuadores de a bordo.
Programación del robot es similar al proceso con el Arduino Leonardo. Ambos procesadores se han incorporado en la comunicación USB, eliminando la necesidad de un procesador secundario. Esto permite que el robot que aparezca a un ordenador conectado como (CDC) de puerto serie / COM virtual.
Como siempre con Arduino, todos los elementos de la plataforma - hardware, software y documentación - es de libre acceso y de fuente abierta. Esto significa que puede aprender exactamente cómo se hace y utilizar su diseño como punto de partida para sus propios robots. El robot Arduino es el resultado del esfuerzo colectivo de un equipo internacional mirando cómo la ciencia puede hacerse divertida de aprender. Arduino es ahora sobre ruedas, viene paseo con nosotros!
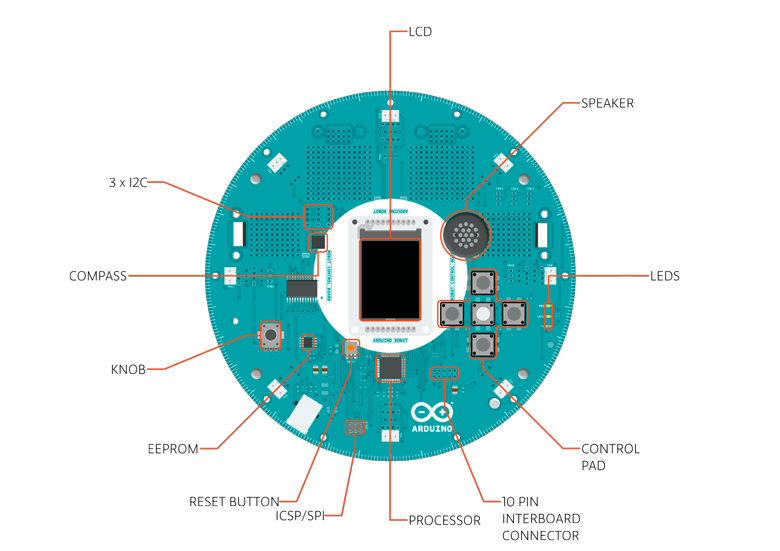
Junta de Control Resumen
| microcontrolador | ATmega32u4 |
| Tensión de funcionamiento | 5V |
| Voltaje de entrada | 5V a través de cable plano |
| E / S digitales prendedores | 5 |
| Canales PWM | 6 |
| Los canales de entrada analógicos | 4 (de los pines E / S Digital) |
| Los canales de entrada analógicos (multiplexados) | 8 |
| Corriente continua para Pin I / O | 40 mA |
| Memoria flash | 32 KB ( ATmega32u4 ) de los cuales 4 KB utilizado por el gestor de arranque |
| SRAM | 2,5 KB ( ATmega32u4 ) |
| EEPROM (interno) | 1 KB ( ATmega32u4 ) |
| EEPROM (externa) | 512 Kbit ( I2C ) |
| Velocidad de reloj | 16 MHz |
| teclado | 5 teclas |
| Nudo | unido al potenciómetro de pin analógico |
| LCD a todo color | sobre la comunicación SPI |
| lector de tarjetas SD | para FAT16 tarjetas con formato |
| Altavoz | 8 Ohm |
| Brújula digital | proporciona la desviación desde el norte geográfico en grados |
| I2C puertos de soldadura | 3 |
| áreas de creación de prototipos | 4 |
| Radio | 185 mm |
| Altura | 85 mm |
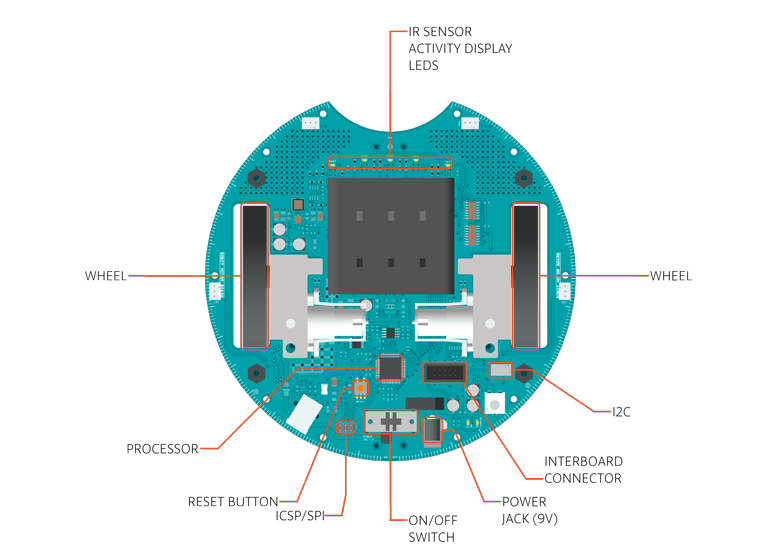
Junta de motor Resumen
| microcontrolador | ATmega32u4 |
| Tensión de funcionamiento | 5V |
| Voltaje de entrada | 9V al cargador de baterías |
| ranura de la batería AA | 4 alcalinas o NiMH baterías recargables |
| E / S digitales prendedores | 4 |
| Canales PWM | 1 |
| Channles entrada analógica | 4 (igual que los pines E / S Digital) |
| Corriente continua para Pin I / O | 40 mA |
| convertidor DC-DC | genera 5V para alimentar todo el robot |
| Memoria flash | 32 KB ( ATmega32u4 ) de los cuales 4 KB utilizado por el gestor de arranque |
| SRAM | 2,5 KB ( ATmega32u4 ) |
| EEPROM | 1 KB ( ATmega32u4 ) |
| Velocidad de reloj | 16 MHz |
| Recortadora | para la calibración movimiento |
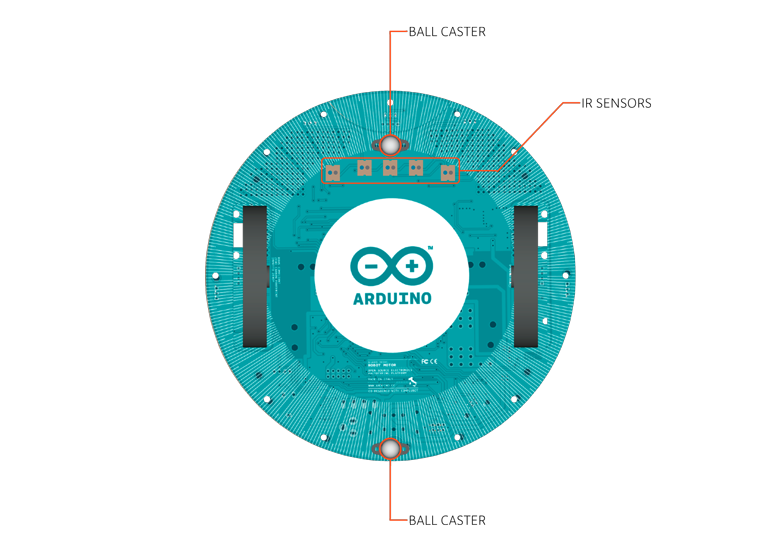
| línea de sensores IR siguiente | 5 |
| I2C puertos de soldadura | 1 |
| áreas de creación de prototipos | 2 |
Esquemática y obras de consulta Diseño
EAGLE archivos para tarjetas de control y de motor: arduino-robot-reference-design.zip
Poder
El robot Arduino puede ser alimentado a través de la conexión USB o con 4 pilas AA. La fuente de alimentación se selecciona automáticamente.
El soporte de la batería tiene 4 recargables de NiMH baterías AA.
NB: No utilice baterías no recargables con el robot
Por razones de seguridad, los motores están desactivados cuando el robot se alimenta de la conexión USB.
El robot tiene un cargador de batería de a bordo que requiere alimentación externa de 9V que viene de un adaptador de CA a CC (pared-verruga). El adaptador se puede conectar al conectar un enchufe de 2,1 mm de centro-positivo en la clavija de alimentación de la tarjeta del motor. El cargador no funcionará si se alimenta a través de USB.
La Junta de Control es alimentado por la fuente de alimentación de la tarjeta del motor.
Memoria
El ATmega32u4 tiene 32 KB (con 4 KB utilizado por el gestor de arranque). También tiene 2,5 KB de SRAM y 1 KB de EEPROM (que puede ser leído y escrito con la biblioteca EEPROM ).
La Junta de Control tiene una EEPROM 512 Kbit adicional que se puede acceder a través de I2C .
Hay un lector de tarjetas SD externa conectada a la pantalla GTFT que se puede acceder por el procesador de la tarjeta de control para almacenamiento adicional.
Entrada y salida
El robot viene con una serie de conectores pre-soldada. Hay una serie de puntos adicionales para la instalación de piezas adicionales si es necesario.
Todos los conectores están etiquetados en las tablas y asignan a los puertos nombrados a través de la biblioteca de robot que permite el acceso a las funciones estándar de Arduino. Cada pin puede proporcionar o recibir un máximo de 40 mA a 5V.
Algunos pines tienen funciones especializadas:
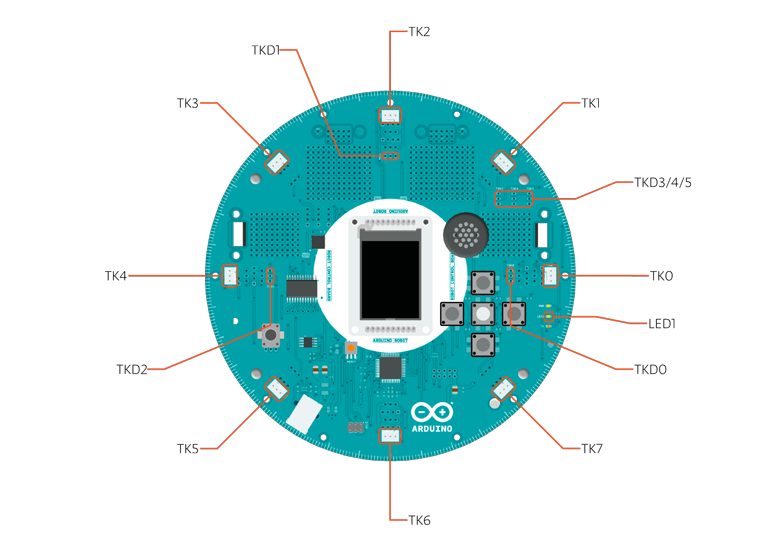
- Junta de Control de TK0 a TK7 : estos pines son multiplexados a un solo pin analógico en el microprocesador del Consejo elControl. Pueden ser utilizados como entradas analógicas para sensores como sensores de distancia, sensores de ultrasonidos analógicas, o interruptores mecánicos para detectar colisiones.
- Junta de Control de TKD0 a TKD5 : estos son digitales pines I / O conectados directamente al procesador, dirigida usando Robot.digitalRead () y Robot.digitalWrite) funciones. Pasadores TKD0 a TKD3 también se puede utilizar como entradas analógicas con Robot.analogRead () Nota: si usted tiene uno de los primeros robots generación, verá que el TKD * pasadores se nombran TDK * en serigrafía del robot. TKD * es el nombre correcto para ellos y es como nos dirigimos a ellos en el software.
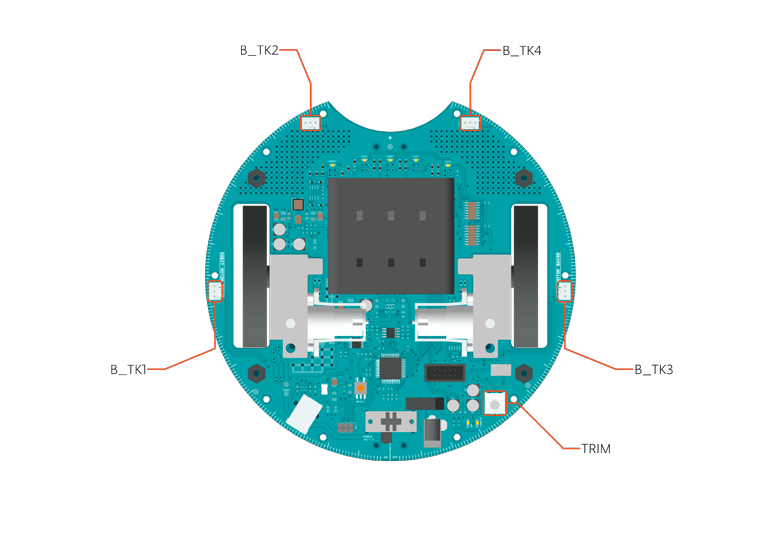
- Motor Junta TK1 a TK4 : estos pines se nombran en software como B_TK1 a B_TK4 , pueden ser los pines de entrada analógica o digital, y apoyar Robot.digitalRead () , Robot.digitalWrite) y Robot.analogRead () .
- Comunicación en serie : Los tableros se comunican entre sí a través del puerto de serie de los transformadores. Un conector de 10 pines se conecta ambos tableros realiza la comunicación en serie, así como el poder y la información adicional como carga actual de la batería.
- Junta de Control de SPI : SPI se utiliza para controlar la tarjeta GTFT y SD. Si desea actualizar el procesador utilizando un programador externo, necesita desconectar la pantalla por primera vez.
- Junta de Control de LEDs : la Junta de Control tiene tres a bordo LEDs . Uno indica el tablero es alimentado (PWR).Los otros dos indican la comunicación a través del puerto USB ( LED1 / RX y TX). LED1 también se puede acceder a través del software.
- Ambas placas tienen I2C conectores disponibles: 3 en la placa de control y 1 en la placa del motor.


Muy buen trabajo :)
ResponderEliminar