Arduino Mega
Visión de conjunto
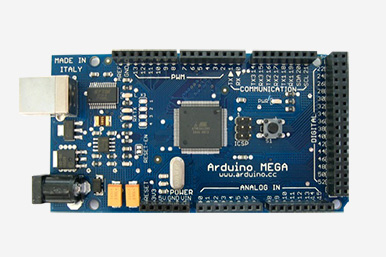
El Arduino Mega es una placa electrónica basada en el ATmega1280 ( ficha técnica ). Cuenta con 54 pines digitales de entrada / salida (de los cuales 14 se pueden utilizar como salidas PWM), 16 entradas analógicas, 4 UARTs (puertos serie de hardware), un 16 MHz oscilador de cristal, una conexión USB, un conector de alimentación, una cabecera ICSP, y un botón de reinicio. Contiene todo lo necesario para apoyar el microcontrolador; basta con conectarlo a un ordenador con un cable USB o la corriente con un adaptador de CA a CC o una batería para empezar. La Mega es compatible con la mayoría de los shield para el Arduino Duemilanove o Diecimila.
Esquemática y obras de consulta Diseño
EAGLE archivos: arduino-mega-reference-design.zip
Esquema: Arduino mega-schematic.pdf
Resumen
| microcontrolador | ATmega1280 |
| Tensión de funcionamiento | 5V |
| Voltaje de entrada (recomendado) | 7-12V |
| Voltaje de entrada (límites) | 6-20V |
| E / S digitales prendedores | 54 (de los cuales 15 proporcionan salida PWM) |
| Pines de entrada analógica | dieciséis |
| Corriente continua para Pin I / O | 40 mA |
| Corriente CC para Pin 3.3V | 50 mA |
| Memoria flash | 128 KB de los cuales 4 KB utilizado por el gestor de arranque |
| SRAM | 8 KB |
| EEPROM | 4 KB |
| Velocidad de reloj | 16 MHz |
Poder
El Arduino Mega puede ser alimentado a través de la conexión USB o con una fuente de alimentación externa. La fuente de alimentación se selecciona automáticamente.
potencia (no USB) externo puede venir con un adaptador de CA a CC (pared-verruga) o la batería. El adaptador se puede conectar al conectar un enchufe de 2,1 mm de centro-positivo en la clavija de alimentación de la placa. Los cables desde una batería pueden ser insertados en los cabezales de pin GND y Vin del conector de alimentación.
La tarjeta puede funcionar con un suministro externo de 6 a 20 voltios. Si se suministra con menos de 7V, sin embargo, el pasador de 5V puede suministrar menos de cinco voltios y la junta puede ser inestable. Si se utiliza más de 12 V, el regulador de voltaje se puede sobrecalentar y dañar la placa. El rango recomendado es de 7 a 12 voltios.
Los pines de alimentación son como sigue:
- VIN. El voltaje de entrada a la placa Arduino cuando se trata de utilizar una fuente de alimentación externa (en contraposición a 5 voltios de la conexión USB o de otra fuente de alimentación regulada). Se puede suministrar tensión a través de este pin, o, si el suministro de tensión a través de la toma de alimentación, acceder a él a través de este pin.
- 5V. La fuente de alimentación regulada utilizada para alimentar el microcontrolador y otros componentes de la placa. Esto puede venir de VIN a través de un regulador de a bordo, o ser suministrado por el USB u otra fuente de 5V regulada.
- 3V3. Un suministro de 3,3 voltios generada por el chip FTDI de a bordo. Consumo de corriente máximo es de 50 mA.
- GND. Patillas de tierra.
Memoria
El ATmega1280 tiene 128 KB de memoria flash para almacenar el código (de los cuales se utiliza 4 KB para el gestor de arranque), 8 KB de SRAM y 4 KB de EEPROM (que puede ser leído y escrito con la librería EEPROM ).
Entrada y salida
Cada uno de los 54 pines digitales en la Mega se puede utilizar como una entrada o salida, utilizando pinMode () ,digitalWrite () , y digitalRead () funciones. Operan a 5 voltios. Cada pin puede proporcionar o recibir un máximo de 40 mA y tiene una resistencia de pull-up (desconectada por defecto) de 20-50 kOhms. Además, algunos pines tienen funciones especializadas:
- De Serie: 0 (RX) y 1 (TX); De serie 1: 19 (RX) y 18 (TX); Serial 2: 17 (RX) y 16 (TX); Serial 3: 15 (RX) y 14 (TX). Se utiliza para recibir (RX) y transmitir datos en serie (TX) TTL. Pins 0 y 1 también están conectados a los pasadores correspondientes del chip de serie FTDI USB-a-TTL.
- Las interrupciones externas:. 2 (interrupción 0), 3 (interrupción 1), 18 (interrupción 5), 19 (interrupción 4), 20 (interrumpir 3), y 21 (interrupción 2) Estos pines se pueden configurar para activar una interrupción en un valor bajo, un flanco ascendente o descendente, o un cambio en el valor. Ver el attachInterrupt () la función para más detalles.
- PWM: 2 a 13 y 44 a 46. proporcionar una salida de PWM de 8 bits con el analogWrite () función.
- SPI:. 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS) Estos pines admite la comunicación SPI, que, aunque proporcionada por el hardware subyacente, no está incluido en el lenguaje de Arduino. Los pines SPI también se desglosan en la cabecera ICSP, que es físicamente compatible con el Duemilanove y Diecimila.
- LED: 13. Hay un LED incorporado conectado al pin digital 13. Cuando el pasador es ALTO, el LED está encendido, cuando el pasador es bajo, es apagado.
- I 2 C: 20 (SDA) y 21 (SCL). Apoyar I 2 Comunicación C (TWI) utilizando la librería Wire (documentación en el sitio web de cableado). Tenga en cuenta que estos pines no están en la misma ubicación que los que 2 pines C en el Duemilanove o Diecimila.
El Mega tiene 16 entradas analógicas, cada uno de los cuales proporcionan 10 bits de resolución (es decir, 1024 valores diferentes). Por defecto se miden desde el suelo a 5 voltios, aunque es posible cambiar el extremo superior de su rango de uso de la función analogReference () pin AREF y.
Hay un par de patas de la placa:
- AREF. Voltaje de referencia para las entradas analógicas. Se utiliza con analogReference ().
- Restablecer. Traiga esta línea baja para reiniciar el microcontrolador. Normalmente se utiliza para añadir un botón de reinicio para escudos que bloquean la una en la mesa.
Comunicación
El Arduino Mega tiene una serie de instalaciones para la comunicación con un ordenador, otro Arduino, u otros microcontroladores. El ATmega1280 ofrece cuatro hardware UART para TTL (5V) de comunicación en serie. Un FTDIFT232RL en los canales bordo de uno de ellos a través de USB y los drivers FTDI (incluido con el software de Arduino) proporcionan un puerto com virtual para el software en el ordenador. El software de Arduino incluye un monitor de serie que permite a los datos de texto simples para ser enviados hacia y desde la placa Arduino. Las RX y TX LED en el tablero parpadean cuando se están transmitiendo datos a través de la conexión USB FTDI chip y al ordenador (pero no para la comunicación en serie en los pines 0 y 1).
Una biblioteca SoftwareSerial permite la comunicación en serie en cualquiera de los pines digitales de los Mega.
El ATmega1280 también es compatible con I2C (TWI) y SPI. El software de Arduino incluye una biblioteca de alambre para simplificar el uso de la I2C bus; ver la documentación en el sitio web de cableado para más detalles. Para utilizar la comunicación SPI, consulte el ATmega1280 hoja de datos.
Programación
El Arduino Mega se puede programar con el software de Arduino ( descarga ). Para más detalles, véase la referencia ytutoriales .
Los ATmega1280 en la Arduino Mega viene precargado con un cargador de arranque que le permite cargar nuevo código a ella sin el uso de un programador de hardware externo. Se comunica usando el original STK500 protocolo ( referencia ,archivos de cabecera C ).
También puede pasar por alto el gestor de arranque y programar el microcontrolador a través del ICSP (In-Circuit Serial Programming) cabecea; ver estas instrucciones para obtener más detalles.
(Software) de reinicio automático
En lugar de requerir una prensa físico del botón de reinicio antes de un proceso de carga, el Arduino Mega está diseñado de una manera que permite que pueda ser restablecido por el software que se ejecuta en un ordenador conectado. Una de las líneas de control de flujo por hardware (DTR) de la FT232RL está conectado a la línea de reposición de losATmega1280 a través de un condensador de 100 nanofaradios. Cuando esta línea se afirma (tomada bajo), la línea de restablecimiento pasa el tiempo suficiente para restablecer el chip. El software de Arduino utiliza esta capacidad que le permite subir el código con sólo pulsar el botón de subida en el entorno Arduino. Esto significa que el gestor de arranque puede tener un tiempo de espera más corto, ya que el descenso de DTR puede ser bien coordinada con el inicio de la subida.
Esta configuración tiene otras implicaciones. Cuando el Mega está conectado ya sea a un ordenador con Mac OS X o Linux, se restablece cada vez que se realiza una conexión a la misma desde el software (a través de USB). Para el siguiente medio segundo o así, el gestor de arranque se ejecuta en el Mega. Mientras que está programado para ignorar los datos con formato incorrecto (es decir, nada, además de un proceso de carga del nuevo código), es interceptará los primeros bytes de datos enviados a la junta después de abrir una conexión. Si un boceto en ejecución en el tablero recibe la configuración de una sola vez o de otro tipo de datos cuando se inicia por primera vez, asegúrese de que el software con el que se comunica espera un segundo después de abrir la conexión y antes de enviar estos datos.
El Mega contiene un rastro que se puede cortar para desactivar el reinicio automático. Las almohadillas a ambos lados de la traza se pueden soldar juntos para volver a habilitarla. Ha marcado "RESET-ES". También puede ser capaz de desactivar el reinicio automático mediante la conexión de una resistencia de 110 ohmios de 5V a la línea de reposición;ver este hilo del foro para más detalles.
Protección multifunción USB
El Arduino Mega tiene un polyfuse reajustable que protege a los puertos USB de su ordenador desde pantalones cortos y sobrecorriente. Aunque la mayoría de las computadoras establecer su propia protección interna, el fusible proporciona una capa adicional de protección. Si hay más de 500 mA se aplica al puerto USB, el fusible se romperá automáticamente la conexión hasta que la corta o se elimina la sobrecarga.
Características físicas y protector de compatibilidad
La longitud máxima y la anchura del PCB Mega son 4 y 2,1 pulgadas, respectivamente, con el conector USB y el poder jack que se extiende más allá de la dimensión anterior. Tres orificios de los tornillos permiten la junta que se une a una superficie o caja. Tenga en cuenta que la distancia entre los pines digitales 7 y 8 es de 160 mil (0,16 "), no un incluso múltiple de la separación de 100 milésimas de pulgada de los otros pasadores.
El Mega está diseñado para ser compatible con la mayoría de los shield para el Diecimila o Duemilanove. Pines digitales 0 a 13 (y la AREF adyacente y pines GND), entradas analógicas de 0 a 5, el cabezal de alimentación, y jefe de ICSP están todos en puntos equivalentes. Aún más la UART principal (puerto serie) se encuentra en los mismos pines (0 y 1), al igual que las interrupciones externas 0 y 1 (pines 2 y 3, respectivamente). SPI está disponible a través del jefe de ICSP tanto en el Mega y Duemilanove / Diecimila. Tenga en cuenta que 2 C no se encuentra en las mismas patillas de la Mega (20 y 21) como el Duemilanove / Diecimila (entradas analógicas 4 y 5).


Arduiono nano... está chevere
ResponderEliminarArduiono nano... está chevere
ResponderEliminarinteresante informacion
ResponderEliminarinteresante informacion
ResponderEliminar